
打坡口机器人是一种自动化设备,主要用于管道、容器等圆形工件的下料、坡口、自动焊接等工作。
打坡口机器人在制造、石化、化工等行业应用广泛,是现代工业生产中不可或缺的重要装备
打坡口机器人主要由机械臂系统、控制系统以及专用切割工具等组成,其基本工作原理是通过控制机械臂系统的运动轨迹,将金属管件沿着规定的轮廓进行切割和加工,从而形成所需的坡口形状。
打坡口机器人的工作流程如下:
设置坡口形状和切割参数:通过控制系统设置坡口形状和切割参数,包括坡口的角度、深度等。
放置金属管件:将待加工的金属管件放置在机器人工作台上,并进行夹持以保证加工的稳定性。
启动机器人系统:通过控制系统启动机器人系统,使机械臂系统开始工作。
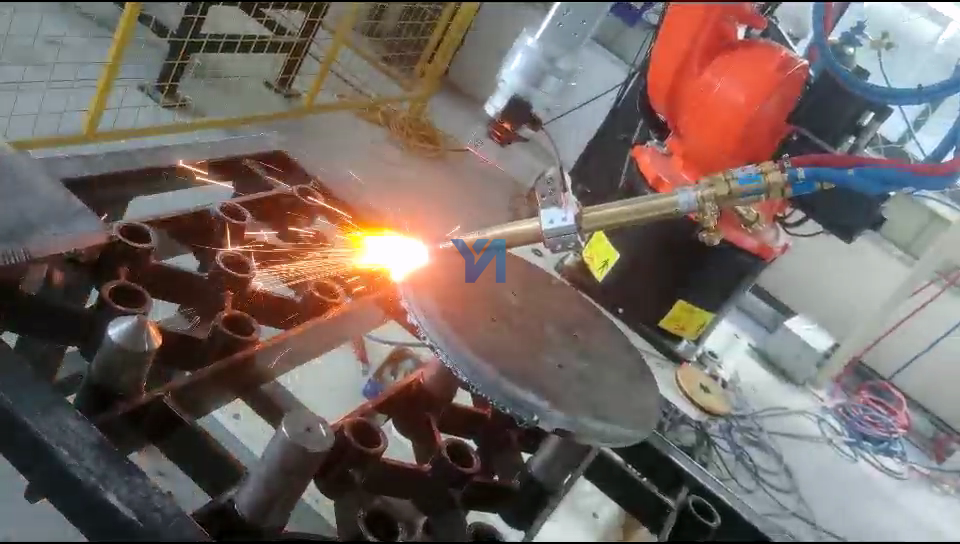
进行坡口切割:机械臂系统按照预设的坡口形状和切割参数,沿着金属管件的轮廓进行切割和加工。
完成加工:机器人系统加工完成后,自动停止工作,用户审核后可进行下一步加工操作。









